







模拟电路设计系列讲座二十四:PID控制策略
有人让讲一下控制系统中的PID,本文就简要介绍一下PID基本控制策略。PID控制是最早发展起来的控制策略之一,由于其算法简单,鲁棒性好和可靠性高,被广泛用于工业控制当中。
常规PID控制系统原理框图如下,该系统由模拟PID控制器以及被控对象组成。

PID控制器是一种线性控制器,它根据给定值r(t)与实际输出值y(t)构成控制偏差:
e(t)=r(t)-y(t)
将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,对被控对象进行控制,故称PID控制器。其控制规律为:

式中:
Kc - 比例系数
TI - 积分时间常数
TD - 微分时间常数
一:PID 控制特点
原理简单,使用方便
适应性强:可以广泛应用于各个工业控制领域
鲁棒性强:即其控制品质对被控对象特征的变化不大敏感
二:PID比例环节
P调节对偏差信号e(t)能够及时作出反应,无任何丝毫的滞后。
输出u实际上是对起始值的增量,因此,当偏差e(t)为0时,u=0,并不意味着调节器没有输出,只说明此时u=u0。
u0的大小是可以通过调整调节器的工作点加以改变的。
简单来说,对于比例环节,偏差一旦产生,控制器就会立即产生控制作用,以减少偏差。
三:积分环节
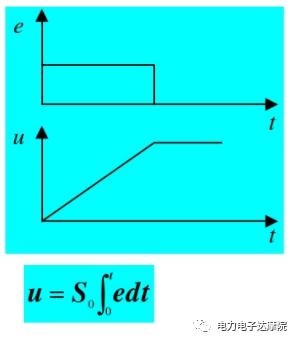
I调节器的输出不仅与偏差信号的大小有关,还与偏差存在的时间长短有关。
只要偏差存在,调节器的输出就会不断变化,直到偏差为零,调节器的输出才稳定下来不再变化。
所以积分调节作用能自动消除余差。
注意I调节的输出不像P调节那样随偏差为零而变到零。
积分调节的特点就是无差调节,只要偏差不为零,控制输出就不为零,它就要动作到把被调量的静差完全消除为止。而一旦被调量偏差e为零,积分调节器的输出就保持不变。
积分调节具有滞后性质,对于同一个被控对象,I调节比P调节进行得要缓慢,除非积分速度无穷大,否则I调节就不能像P调节那样及时对偏差加以响应,而是滞后于偏差的变化,它的滞后性使其难以对干扰进行及时控制。
所以在工业控制中,积分环节通常和其他控制策略一起使用。
简单来讲,积分环节主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数TI,TI越大,积分作用越弱,反之则越强。
P调节与I调节比较
P调节及时性强,但有余差;
I调节无余差,但超调大,不如P稳定。


 分享
分享
图片新闻








技术文库
最新活动更多
-
即日-12.26立即报名>>> 【在线会议】村田用于AR/VR设计开发解决方案
-
1月8日火热报名中>> Allegro助力汽车电气化和底盘解决方案优化在线研讨会
-
1月9日立即预约>>> 【直播】ADI电能计量方案:新一代直流表、EV充电器和S级电能表
-
即日-1.14火热报名中>> OFweek2025中国智造CIO在线峰会
-
即日-1.20限时下载>>> 爱德克(IDEC)设备及工业现场安全解决方案
-
即日-1.24立即参与>>> 【限时免费】安森美:Treo 平台带来出色的精密模拟
推荐专题







发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论