







基于ARM和CPLD的无线内窥系统设计
1.3 系统工作原理
内窥系统可以实现图像的连续采集以及温度、湿度、照明亮度等的控制。其中图像采集是系统的核心,其工作流程如下:
①默认情况下,系统工作在休眠状态。
②工作人员通过PC管理软件发送命令开始采集图像,软件通过USB接口把命令发送给蓝牙适配器,然后发送给无线内窥镜。
③内窥镜接收到图像采集命令后,ARM控制CPLD开始采集图像数据。
④CPLD把采集到的一帧图像数据写入一块SRAM中,把ARM的总线切换到该SRAM上,并通知ARM进行压缩;同时CPLD往另一块SRAM中继续采集下一帧图像,便于提高系统的吞吐率。
⑤ARM通过蓝牙模块返回响应命令,并返回采集JPEG-LS图像的头信息。
⑥PC管理软件发送命令接收下一行压缩图像,ARM压缩该行原始图像,并发送压缩数据;如果出错,可以重新发送。重复本步骤可以获取整帧压缩图像。
⑦PC软件对压缩图像解码并显示,并提供其他附加功能,如图像处理、保存等。
⑧重复步骤②~⑦,获取下一帧压缩图像。
由上述流程可以看出,JPEG-LS压缩以及无线信道传输决定整个系统的图像传输速率。无线传输采用蓝牙技术,其标称空中速率为1 Mbps,不易提高;因此,系统设计的核心是JPEG-LS的编码效率。
2 ARM与摄像头接口设计
系统采用美国Omni Vision公司(简称为“OV公司”)开发的CMOS彩色图像传感器芯片。该芯片将CMOS光感应核与外围支持电路集成在一起,具有可编程控制与视频模/数混合输出等功能。
(1)SSCB配置
为使芯片正常上作,需要通过SCCB总线来完成配置工作。SCCB总线是OV公司定义的一套串行总线标准,与I2C总线类似。配置时,主要是写OV7660的内部寄存器,使芯片输出格式正确的彩色图像数据。OV7660共有100个左右的寄存器可以配置,其数据手册并未提供可用的配置值。系统调试过程中,通过各种测试,测出以下一系列配置数据,可使OV7660输出颜色丰富的图像,如表l所列。

(2)图像数据访问
AT91R40008不带摄像头接口,因此系统增加了一块CPLD实现CMOS摄像头的时序,如图3所示。ARM只须访问SRAM就可以访问图像数据。CPLD确保ARM的总线每次都只挂接一块有完整图像的SRAM。
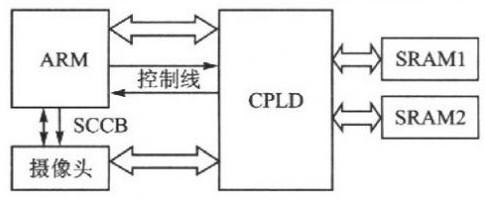
图3 ARM与CPLD接口设计

 分享
分享
图片新闻








技术文库
最新活动更多
-
即日-12.26立即报名>>> 【在线会议】村田用于AR/VR设计开发解决方案
-
1月8日火热报名中>> Allegro助力汽车电气化和底盘解决方案优化在线研讨会
-
1月9日立即预约>>> 【直播】ADI电能计量方案:新一代直流表、EV充电器和S级电能表
-
即日-1.14火热报名中>> OFweek2025中国智造CIO在线峰会
-
即日-1.20限时下载>>> 爱德克(IDEC)设备及工业现场安全解决方案
-
即日-1.24立即参与>>> 【限时免费】安森美:Treo 平台带来出色的精密模拟
推荐专题







发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论