







4日10日 OFweek 2025(第十四届)中国机器人产业大会
立即报名 >>>
7.30-8.1 全数会2025(第六届)机器人及智能工厂展
火热报名中>>
基于ARM和CPLD的无线内窥系统设计
引 言
当前,医用无线内窥镜已有产品问世。以色列GI公司早在2001年5月即推出其M2A无线内窥镜产品,并获得美国FDA认证。GI公司生产的胶囊型内窥镜长为26 mm,直径为11mm,重3.5g;采用微功耗CMOS图像传感器,可观察视角为14O°,可看清0.lmm左右的物体,采集速度为2帧/s。日本RF公司也于2001年底研制出NORIKA3胶囊型内窥镜系统。该产品采用超小型CCD摄像头,含有8个镜头,可观察视角为360°,图像帧率可达30帧/s。“NORIKA3”利用位于药丸内的转子线圈与产生磁场的体外定子线圈形成马达结构来实现药丸系统姿态控制。RF公司在其网站上发布了产品的设计模型。此外,Gong和Park等人电独立发表论文,描述了各自关于无线内窥镜的设计。
目前国内尚无独立制造该产品的能力,而国外的产品价格昂贵,因此,研发具有自主知识产权的无线内窥镜产品具有重要意义。本文介绍无线内窥系统的系统结构,图像压缩标准JPEG-LS在ARM7平台上的实现,以及实现过程中所采用的调试方法、优化方法。
1 系统组成与工作原理
1.1 内窥系统组成结构
如图1所示,无线内窥镜系统主要由主机和从机(无线内窥镜)组成。从机由摄像头采集原始图像,经过压缩处理,通过无线方式把压缩后的图像数据传输给主机;主机通过USB连接蓝牙适配器接收压缩图像,并转发给PC上的管理软件,管理软件将图像解压缩并显示出来。
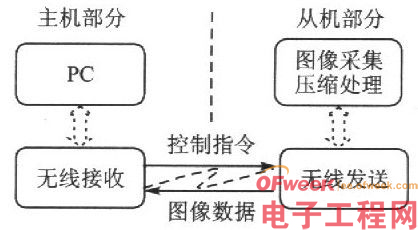
图1 内窥系统结构框图
1.2 无线内窥镜组成结构
如图2所示,无线内窥镜采用CPLD芯片EPM7256-144,实现30万像素CMOS摄像头OV7660的图像采集控制,以及数据和地址总线的切换。利用Atmel公司的ARM7芯片AT91R40008,实现JPEG-LS无损图像压缩与蓝牙无线数据传输,实现温度、压力采集以及可控光源和系统控制。CPLD和ARM7之间的图像数据交换通过8位数据总线实现,ARM7和CPLD之间的握手控制则通过I/O口线实现。由于图像数据量较大,按640×480分辨率、8位图像的格式计算达几十万字节,故本系统外部扩展了2片上作在乒乓方式的512KB的SRAM作数据缓存。
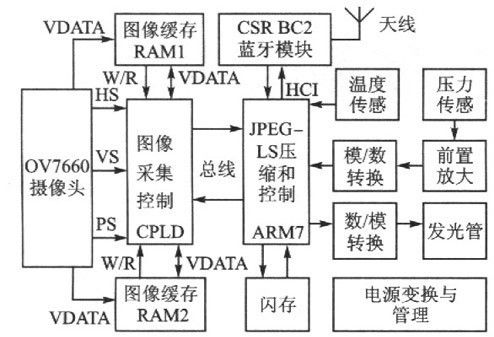
图2 无线内窥镜硬件结构框图

 分享
分享

图片新闻








技术文库
最新活动更多
-
3月27日立即报名>> 【工程师系列】汽车电子技术在线大会
-
4月1日立即下载>> 【村田汽车】汽车E/E架构革新中,新智能座舱挑战的解决方案
-
4日10日立即报名>> OFweek 2025(第十四届)中国机器人产业大会
-
即日-4.22立即报名>> 【在线会议】汽车腐蚀及防护的多物理场仿真
-
4月23日立即报名>> 【在线会议】研华嵌入式核心优势,以Edge AI驱动机器视觉升级
-
4月25日立即报名>> 【线下论坛】新唐科技2025新品发布会
推荐专题




-
1 HBM4大战







发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论