

车载视觉
车载视觉指的是在汽车中应用机器视觉传感器来替代人眼的视觉,其是结合了光学、计算机技术等知识以及车辆运动的特点而形成的,是无人驾驶技术的发展重点,但车载视觉易受到如下因素影响:(1)天气变化。天气变化主要影响光线强度变化状况。光线直射,会引起摄像机过度曝光;光线过暗,会影响摄像机曝查看详情>光不足。这会使摄像机图像中产生无纹理的高光和低光区域。(2)车辆速度变化。一般来说车辆速度与画面质量成反比。速度较慢时,图像接近静止图片,质量较好;速度较快时,受相机拍摄帧数的限制,会在原始图像中产生模糊区域。(3)车辆运动轨迹。一般来说车辆运动轨迹分为直线和曲线两种。当在直线位置时,相机前后帧当中特征匹配重叠率较高,相机水平面基本与地面平行;当在曲线位置时,相机与地面有侧倾角,使相机水平面侧倾于水平地面,从而降低匹配重叠率。(4)相机安装位置。安装位置分为车内和车外,车内和车外的主要区别在于玻璃反射率和车内阴影的影响。还有一个重要因素是俯仰角的区别,相机俯仰角越朝下,对照度越敏感,越容易出现曝光或曝光不足。相机安装越平行于路面,由于视觉图像中像素精度和距离成反比,图像算法的精度就越低,故安装位置的不同对后期算法开发有重要影响。(5)随机扰动。随机扰动包括轮胎与地面的摩擦系数、路面的凹凸等情况,这些随机扰动都会使运动图像产生模糊,进而影响车辆行驶监测效果。
-

-
菲沃泰:可为车载充配电单元产品提供纳米镀膜防护
近日,联合电子宣布其新一代车载充配电单元产品CharCON5U成功实现批量交付。据悉,联合电子对该产品生产工艺进行了升级,引入纳米镀膜工艺替代传统涂敷,实现了无死角三防保护。随着国内新能源汽车的快速发
菲沃泰 2025-03-07 -

大联大友尚集团推出基于onsemi产品的6.6kW车载电动汽车充电器方案
2025年2月6日,致力于亚太地区市场的国际领先半导体元器件分销商---大联大控股宣布,其旗下友尚推出基于安森美(onsemi)NCV4390、FAN9673Q、NVHL020N090SC1、NVHL060N090SC1等产品的6.6kW车载电动汽车充电器方案
大联大友尚集团 2025-02-06 -

车载 GaN 功率器件进入发展拐点!
芝能智芯出品 随着电动汽车及相关技术的蓬勃发展,对高性能功率器件的需求与日俱增,氮化镓(GaN)功率器件凭借自身优势逐渐崭露头角。 在汽车领域,GaN 器件具备低导通电阻、高开关频率、紧凑设计等长处,应用潜力巨大
-
4轮融资签订4次对赌协议,弘景光电凭借车载摄像头要上市了
前言: 根据官方公开资料,弘景光电于2022年10月向相关监管机构提交了上市辅导备案文件,2023年6月向深圳证券交易所提交了创业板上市申请,并在对审核问询作出回应后,公司已顺利通过上市审核。 作
-

研华合作Innodisk 以AFE-R360MIPI摄像头模块解锁AMR视觉功能
全球AIoT和边缘计算厂商研华科技宣布与全球先进的AI解决方案提供商Innodisk达成合作。此次合作将为研华基于Intelx86的AFE-R360解决方案及Innodisk可定制的MIPI摄像头模块
研华 2024-11-20 -

利用运动唤醒功能优化视觉系统的功耗
您有没有想过,智能门铃如何检测到有人走到您家门口,又如何通过摄像头识别重要动作?答案就是图像传感器。这些微型传感器内置在智能门铃中,始终以全状态(全分辨率、30fps)运行,其中记录的图像可以清楚地显示是什么人或什么物体正在接近您家门口
安森美 2024-11-06 -

东芝推出面向车载直流有刷电机的新款栅极驱动器IC,助力缩小设备尺寸
中国上海,2024年9月10日——东芝电子元件及存储装置株式会社(“东芝”)今日宣布,推出面向车载直流有刷电机的新款栅极驱动器IC[1]
东芝 2024-09-10 -

设计车载充电器的关键考虑因素
改用电动汽车 (EV) 后,驾驶员感受到的最大变化可能是补能方式不一样了。具体来说,他们不再需要驱车前往加油站,而是必须找到可用的充电点。 尽管公共充电桩的数量正在迅速增加,但许多人仍然更喜欢在家里充电
安森美 2024-09-10 -

【展商推荐】光鉴科技:专注于智能视觉感知技术的研发与应用
【光鉴科技】即将亮相全数会 2024电子元器件展览会展位号:8B25深圳市光鉴科技有限公司光鉴科技以“创造新维度”为使命,专注于智能视觉感知技术的研发与应用。公司致力推动3D视觉领域的创新发展,将多维视觉感知技术转化为现实,并在多场景下实现广泛应用,为万物互联时代打造更具创新性的视觉基础设施
光鉴科技 2024-08-22 -

研华AFE机器人专用控制器:集多视觉与强抗干扰的机器人"大脑"
为了应对人工成本上升和人口老龄化的挑战,世界各地的公司都在寻求创新的解决方案来优化资源并保持竞争力,这使得自动化比以往任何时候都更加重要。迎接机器人市场快速发展的趋势,研华推出面向AMR机器人应用AFE-R系列产品:AFE-R360和AFE-R770
研华 2024-07-22 -

清华团队研制出世界首款类脑互补视觉芯片
前言: 清华大学类脑计算研究中心团队成功研发出[天机芯]与[天眸芯],此举标志着中国在[类脑计算]与[类脑感知]两大核心领域取得了原创性的底层技术突破。 此外,该团队还围绕[类脑智能生态]开发了一系列具有实际应用价值的类脑软件工具与类脑机器人技术,并已成功实现落地应用
-

大联大友尚集团推出基于NuVolta产品的车载无线快充方案
2024年6月4日,致力于亚太地区市场的国际领先半导体元器件分销商---大联大控股宣布,其旗下友尚推出基于伏达半导体(NuVolta)NU8060Q芯片的车载无线快充方案。 图示1-大联大友尚基
大联大友尚集团 2024-06-04 -

面向现代视觉系统的低功耗图像传感器
在更快的连接速度、更高的自动化程度和更智能系统的推动下,工业4.0加快了视觉技术在制造业中的应用,并将智能化引入到以往简单的数据采集系统中。上一代视觉系统负责捕捉图像,对其进行封装以供传输,并为后续的FPGA、ASIC或昂贵的SoC等器件提供图像数据进行处理
安森美 2024-05-28 -

DU562音频处理芯片—车载娱乐设备音响解决方案
作为车载娱乐设备的核心组件,DSP音频处理芯片在车载娱乐设备中起关键作用,它可以对音频信号进行实时处理和增强,以提供更好的音质和音效体验;可实时处理和增强音频信号;通过声音均衡功能,可自由调节音频信号
-

车载以太网交换芯片玩家 TOP 10
--芯图新势-- 作者&制图 I 芯潮IC ID I xinchaoIC TSN,是车载网络下一代技术演进的重要方向。 车载以太网
-

车载导航触摸屏中应用的触摸感应芯片
近年来,汽车导航系统的发展非常迅速。目前,人们不但可以在购买新车时选择导航系统作为选择配置,还可以在已有的汽车上安装该设备,甚至可以配置一台移动式的卫星导航系统,开那辆车就把它放到那辆车上,或者带着它去野游、爬山
-

小米CyberDog采用银牛3D视觉感知方案
2024年3月21日,合肥银牛微电子宣布小米CyberDog系列仿生四足机器人的AI多模态融合感知决策系统正式采用银牛的双目立体视觉产品解决方案。银牛将为小米提供高性能的双目立体视觉
银牛 2024-03-21 -
逐点半导体与网易《逆水寒》手游就移动端视觉处理优化达成合作
中国上海,2024年3月18日——专业的视觉处理方案提供商逐点半导体宣布,为全球领先的游戏研发公司网易游戏旗下雷火事业群出品的旗舰级手游《逆水寒》提供移动端视觉处理优化解决方案
逐点半导体 2024-03-18 -
瑞萨面向具备视觉AI和实时控制功能的下一代机器人 推出功能强大的单芯片RZ/V2H MPU
2024 年 2 月 29 日,中国北京讯 - 全球半导体解决方案供应商瑞萨电子(TSE:6723)今日宣布推出一款面向高性能机器人应用的新产品——RZ/V2H,进一步扩展其广受欢迎的RZ产品家族微处理器(MPU)
瑞萨 2024-02-29 -

CMOS 图像传感器为自动驾驶汽车提供视觉感知
要实现全自动驾驶汽车,需要整合来自多种传感器的信息,其中摄像头的信息可能是最重要的。这些摄像头必须能够在各种条件下连续捕捉最微小的细节,以确保车辆乘客和其他道路使用者的安全。本文将探讨在选择图像传感器时需要注意的关键特性,以便为自动驾驶汽车提供所需的出色功能组合
安森美 2024-02-26 -

车载UVC杀菌灯中应用的紫外线杀菌灯珠
在病毒、细菌的传播可以说是一个让人敏感而恐惧的事情。而对于车内较小的空间,乘坐人员流动性大,更容易残留细菌病毒。车内缺少通风,残留的污垢垃圾也会滋生细菌,加快细菌的繁殖。所以对于车内消毒就自然不容忽视
-
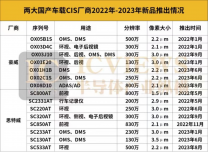
赋能自动驾驶,车载CIS芯片在爆发的前夜
编者按:在汽车电动化、网联化、智能化、共享化的推动下,汽车电子站到了产业的台前,并迎来了新一轮爆发。半导体产业纵横特别推出《纵横专题:汽车电子特辑》,从应用视角看汽车电子的最新进展,从应用视角看汽车电子的最新进展
-

应用案例 | 三维线激光扫描仪,车载ABS泵圆柱件段差&位置度检测
防锁死刹车系统(ABS)是汽车安全设备中的重要组成部分,与安全气囊、安全带并称为汽车安全的三大发明。ABS不仅具备普通制动系统的功能,更能防止车轮在刹车时锁死,确保汽车在制动过程中的转向控制和稳定性,有效避免侧滑和跑偏,被广泛应用于现代汽车中,是最先进且效果最佳的制动装置
三维线激光扫描仪 2023-10-19 -

车载DSP:新应用孕育国产“芯”机遇
数字信号处理器(DSP)是一类专门用于实现数字信号处理算法的半导体器件,其与CPU、GPU、FPGA并称为“四大通用芯片”;依托丰富的数字信号处理指令、独立高效的存储及总线结构、更完备的外设资源以及低
数字信号处理器 2023-10-19 -

开辟全新战场 !高通正式官宣:将为奔驰宝马提供车载芯片
快科技9月6日消息,日前,高通官宣了多项合作,包括向奔驰和宝马提供车载信息娱乐系统所需的芯片。 据悉,高通的骁龙数字底盘解决方案将赋能宝马/MINI家族全新车型,旗下高性能的骁龙座舱平台、骁龙汽
-
焕然升级 | 全新3D线激光视觉取图软件,带来前所未有的体验!
全新升级的线激光视觉取图软件,采用基于三角反射原理的线激光相机,能够快速扫描物品,并提供出色的图像效果。通过优化算法和技术,软件能够呈现更加逼真的3D效果,让用户获得更加真实的视觉体验。此外,扫描速度也得到了大幅提升,为用户提供更高效的操作体验
-

安谋科技牵头发布《车载智能计算芯片白皮书》,洞见智驾智舱“芯”趋势
近日,为推动国产车载智能计算芯片技术发展与生态建设,安谋科技(中国)有限公司(以下简称“安谋科技”)携手多家汽车半导体行业合作伙伴,在深圳举办主题为“车载智能计算”的线下技术沙龙,并重磅发布了《车载智能计算芯片白皮书(2023版)》(以下简称“《白皮书》”)
-

安森美 (onsemi) M3S EliteSiC MOSFET 让车载充电器升级到 800V 电池架构
作者:安森美产品推广工程师Vladimir Halaj自电动汽车 (EV) 在汽车市场站稳脚跟以来,电动汽车制造商一直在追求更高功率的传动系统、更大的电池容量和更短的充电时间。为满足客户需求和延长行驶里程,电动汽车制造商不断增加车辆的电池容量
-

是德科技携手温莎大学进行车载网络安全培训
是德科技为汽车工程学生提供高级培训,帮助他们应对软件定义汽车的网络安全挑战自动化的开源平台采用预编程,支持标准测试场景,并且完全可定制是德科技(Keysight Technologies, Inc.)
是德科技 2023-06-26 -
Arm推出全新智能视觉参考设计:将服务于中国市场
在算力高速提升和模型演进的AIoT新时代,智能视觉技术正变得越来越重要,尤其是在智慧家居、智慧城市、零售和智能制造等领域,智慧视觉技术带来了更高效、更安全、更有竞争力的辅助和监控监测等解决方案。作为物联网基石的Arm,其技术正驱动着当今市场上众多智能视觉设备的发展
-
逐点半导体视觉显示技术为《晶核》带来丝滑稳定的120帧手游体验
从内容到终端全方位优化手游显示体验,如实呈现精密机械和奇妙魔法交织的阿特兰世界中国上海,2023年5月9日——专业的创新视频和显示处理解决方案提供商逐点半导体今日宣布,知名游戏品牌朝夕光年出品的《晶核
?逐点半导体 2023-05-09 -
欧盟前沿性NimbleAI项目采用定制RISC-V处理器来支持神经形态视觉与3D集成芯片
作者:Codasip随着越来越多的研究伙伴加入以及新技术和新产品的不断披露,欧盟于2022年底启动的NimbleAI这一前沿项目在喧嚣的GPT热潮中,开始展现出一条新的智能化和数字化转型之道。NimbleAI旨在推动神经形态视觉(neuromorphic vision)传感和处理技术的发展和研究
-
思特威全新推出两颗高帧率面阵CMOS图像传感器新品,赋能主流工业机器视觉应用
2023年4月20日,中国上海 — 思特威(上海)电子科技股份有限公司(股票简称:思特威,股票代码:688213),重磅推出两颗2.3MP和1.3MP高帧率工业面阵CMOS图像传感器新品——SC233HGS和SC133HGS
-

湾测 WONSOR 三维线激光扫描仪 |车载ABS泵圆柱件段差&位置度检测
ABS泵,中文译为“防锁死刹车系统”.它与安全气囊,安全带统称为汽车安全史上的三大发明。它是一种具有防滑、防锁死等优点的汽车安全控制系统。现代汽车上大量安装防抱死制动系统,ABS既有普通制动系统的制动
-
Nexperia推出适用于24 V电源系统的车载网络ESD保护产品组合
各种封装、电容等级和36 V VRWM为商用车辆应用提供了设计灵活性奈梅亨,2023年3月6日:基础半导体器件领域的高产能生产专家Nexperia今天推出符合AEC-Q101标准的产品组合,其中包含六
-
贸泽备货ams OSRAM Mira220全局快门图像传感器 满足多种机器视觉应用需求
2023年2月27日 – 专注于推动行业创新的知名新品引入 (NPI) 分销商™贸泽电子 (Mouser Electronics) 即日起开始备货ams OSRAM的Mira220全局快门传感器
-
逐点半导体为真我 GT Neo5的强劲视觉显示性能注入澎湃动力
高帧率、高清晰度、高色准,让沉浸式视觉体验接连上分中国上海,2023年2月9日——专业的视频和显示处理解决方案提供商逐点半导体携手科技潮牌realme正式宣布,新发布的真我 GT Neo5 智能手机搭
逐点半导体 2023-02-09 -
视觉检测、工业电机、自动化....电子工程师最关注的技术话题都来了!
近年来,随着新兴产业的蓬勃发展,我国工业自动化控制技术、产业和应用有了很大发展,促进我国工业自动化市场规模不断增长。数据显示,2019年我国工业自动化行业市场规模达到1895亿元,同比增长1.61%。预计2021年我国工业自动化行业市场规模将达1976亿元,2022年将进一步达到2087亿元
