







4日10日 OFweek 2025(第十四届)中国机器人产业大会
立即报名 >>>
7.30-8.1 全数会2025(第六届)机器人及智能工厂展
火热报名中>>
CAN总线的特点、帧类型以及应用中的注意事项
1980年,Bosch的工程师开始研究汽车上高速串行通信的问题,并在1986年发布了CAN(Controller Area Network)总线。CAN以其多主,高速(最高1Mbps),抗干扰的特性被广泛应用汽车及各种工业环境。在此我们主要介绍一下CAN总线的特点,帧类型,以及应用中的注意事项。
1.CAN总线特点
1.1多主控制
跟我们常用的RS485只有一个主机,从机只能等待主机的轮询不同,在CAN总线中,当任意一个节点监测到总线空闲时,就可以立即启动信息的发送,也就是每一个节点都可以当主机。当然,这马上会引起我们的担心。如同一个家庭每个人都当家做主,那还不乱了套吗?不急,我们来看一下。这个问题是如何被巧妙地解决的。
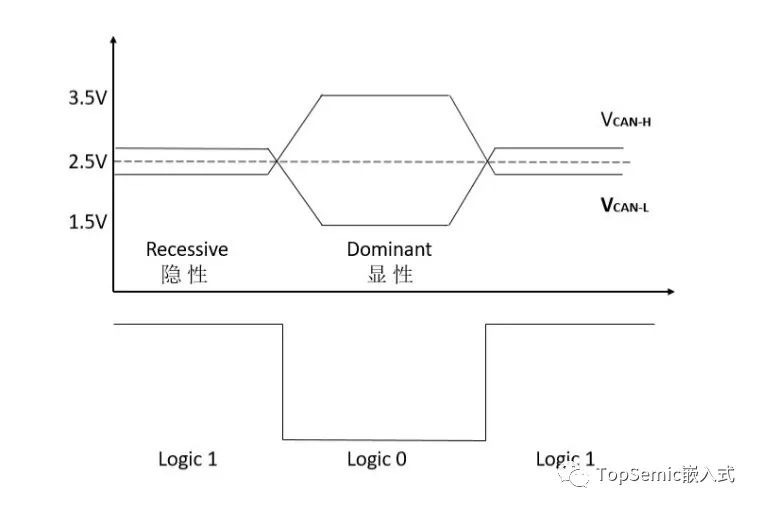
物理层,CAN采用差分总线。单片机引脚的逻辑电平0,被CAN收发器(PHY)转换为显性电平(Dominant),逻辑电平1被转换为隐性电平(Reccesive)。总线上执行的是“线与”逻辑,只要有一个节点输出显性电平,那么总线上就是显性电平。
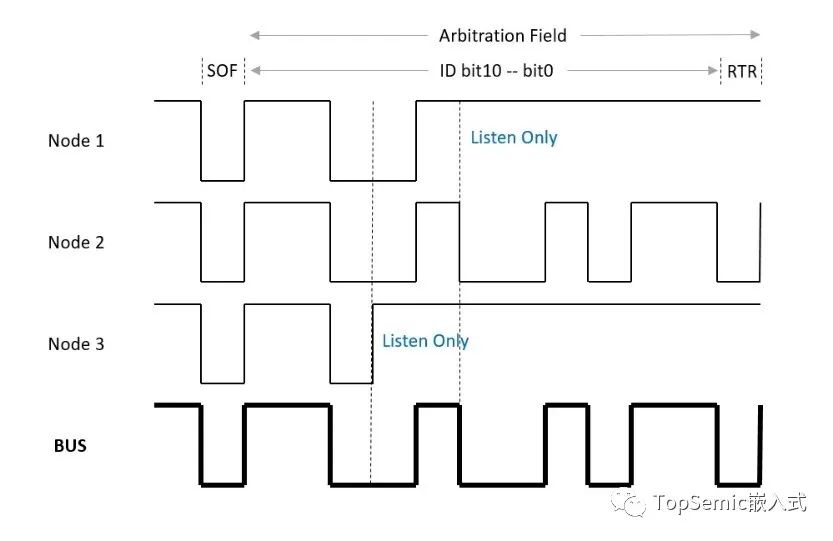
仲裁(Arbitration),CAN的发送总是以SOF(Start Of Frame)起始,紧跟器后是ID。在发送ID的同时,节点监听总线上的显隐状态,当监听到的状态与自己发送的不一致时,此节点将停止发送,进入只收模式。如下图所示,每一帧消息所具有的ID决定了此消息的优先级,发送最高优先级消息的节点获得总线最后的控制权,得以最终完整的发送自己的消息。
接收滤波(Filter)。一个挂在总线上的节点可以监听到所有的消息(Message),但通常我们只对其中某些消息感兴趣,这时怎么办呢?CAN模块一般会提供接收滤波功能(Filter)。通过设置滤波寄存器,我们可以达到接收消息时,比对ID所有位,也可以只比对ID某些位,从而达到只接收ID与自己完全相同的消息,或接收ID与自己部分相同的消息的目的。利用这种机制可以给节点编组,给组成员群发消息。
1.2速度快,距离远
CAN总线可以达到1Mbps的速率。总线速度随着传输距离增加而下降,下面是一些典型速率。在一个数据帧内可以传送8个字节的数据。
1000kbps 40m
500kbps 130m
100kbps 620m
50kbps 1300m
5kbps 10000m
2012年,Bosch又发布了CANFD(CAN with Flexible Data-rate),最高速率可以达到10Mbps,在一个数据帧内可以传送64字节的数据。2015 年 ,国际标准化组织(ISO)正式发布支持CAN FD的11898-1协议。
2.帧类型
CAN协议很简洁,只包含4种帧类型。
数据帧(Data Frame),用来把数据从发送节点传送至接收节点。
远程帧(Remote Frame),一个节点用来请求其它节点发送数据。一个节点发送远程帧时会把Arbitration Filed最后一位RTR(置1),具有相同ID的节点会把数据发送到总线上。
错误帧(Error Frame),当一个节点检测到错误时会向总线发出错误帧,以通知其它节点。
过载帧(Overload Frame),用来在数据帧或远程帧之间插入延时。
帧间隔(Interframe Space),不是一种帧类型。它是帧之间的间隙,由多个连续的隐性电平构成。
在编程时我们直接用到的就是数据帧和远程帧。软件编程比较简单,需要注意的是一般需要设置寄存器中的初始化请求位(Initialization request),使模块进入初始化状态,才能开始进行CAN模块的各种配置,初始化完成后退出初始化状态,进入运行状态。
3.CAN总线应用注意事项
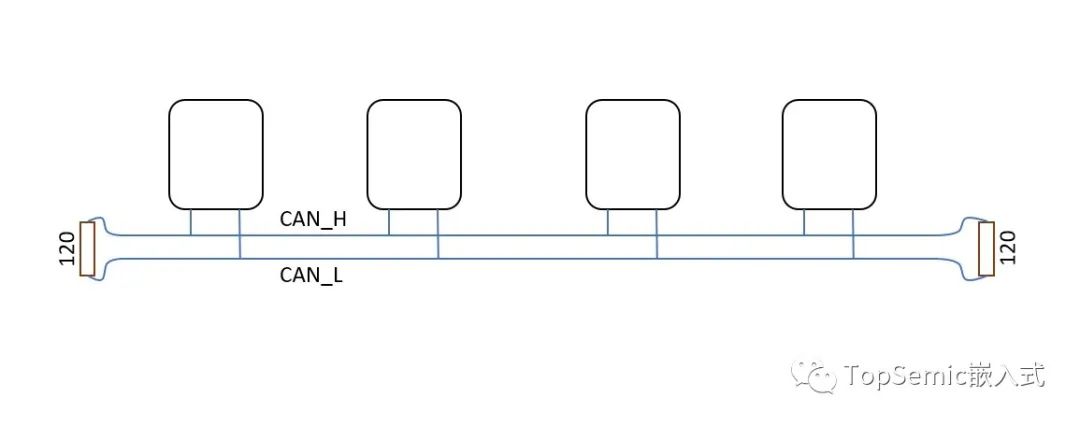
3.1终端匹配电阻
在CAN总线的两端要用120欧的电阻端接进行阻抗匹配,因为CAN总线长度一般会比较长,传输的信号速度快,特别是信号的边沿跳变部分频率很高。
传输线效应 平常我们总是认为电信号从一个引脚发出,通过导线,瞬间就会到达接收引脚,导线上的电压处处是相等的。但是当信号的频率很高,或者导线特别长,总之导线的长度接近传导信号波长的1/10后,我们就需要转变一下我们的观念,此时信号的传输主要受电缆特性阻抗的影响。
电缆特性阻抗 = 信号电场强度(伏特/米) / 磁场强度(安培/米)
电缆的特性阻抗与电缆的材质,粗细,线缆之间的距离有关,而与电缆的长度无关。电缆的特性阻抗还和信号的频率有关,但是当频率增加到一定数值时,特性阻抗不再变化。常用的带屏蔽双绞线的特性阻抗是120欧。
信号在阻抗不连续处会产生反射,所以要保持电缆阻抗的连续性,而且线缆终点需要用等于电缆特性阻抗的电阻进行端接,以消耗掉传输至端点的信号,否则信号会反射回去和后续发出的信号产生叠加,引起错误。
频率与波长对应关系
150K 2000m
500K 600m
1M 300m
10M 30m
端接电阻的另一个作用是可以使CAN总线从显性状态快速回到隐性状态。因为在显性状态下,两条线缆CAN_H, CAN_L之间的寄生电容会被充电,如果没有一个放电回路,总线不能快速回到隐性状态。
3.2EMC防护
CAN常常工作在强干扰的工业环境中,采用屏蔽双绞线会极大的提升EMC防护性能。同时如果数字电路部分和CAN收发器之间用高速光耦隔离开,并且对两部分采用完全隔离的电源供电,那么可以把总线上的干扰最大限度地隔离在外部。
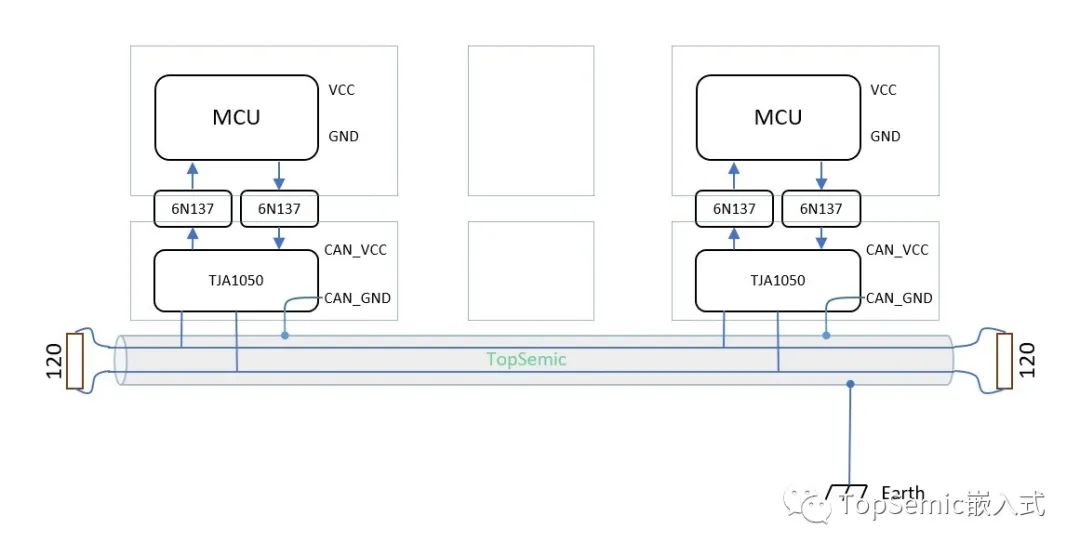
需要注意的是屏蔽层只能在一点接入大地。如果在多个点接地,那么通过大地会形成电流环路,反而会引入噪声。
3.3时钟容差(Oscillator Tolerance)
总线的速度越高,需要的时钟精度越高。一般在低于125kpbs时可以用低成本的陶瓷震荡器(ceramic resonators),更高的速度下建议使用晶体振荡器(Quartz,or Crystal Oscilators)。
3.4CAN模块死机现象
CAN模块内部有监控电路,总线上的异常,如短路等,会引起错误计数器增长。TEC(Transmit Error Counter), REC(Receive Error Counter)。当发送错误TEC计数超过255后,CAN模块进入BUS-OFF模式,此节点不能发送也不能接收。这样做的好处是可以避免由个别模块的问题引起整个总线不能工作。
芯片一般会提供两种恢复机制:自动和手动模式。比如在STM32单片机中,如果ABOM位设置为1,CAN模块将不断尝试自动恢复。如果ABOM=0,则需要程序进入CAN初始化模式,重新配置后,再退出初始化进入正常工作模式。
由于CAN总线非常可靠,不易出错,所以在测试阶段建议人为制造一些总线错误,比如短路,断路,强干扰之类,看程序是否能从异常状态下恢复。

 分享
分享

图片新闻








技术文库
最新活动更多
-
3月27日立即报名>> 【工程师系列】汽车电子技术在线大会
-
4月1日立即下载>> 【村田汽车】汽车E/E架构革新中,新智能座舱挑战的解决方案
-
4日10日立即报名>> OFweek 2025(第十四届)中国机器人产业大会
-
即日-4.22立即报名>> 【在线会议】汽车腐蚀及防护的多物理场仿真
-
4月25日立即报名>> 【线下论坛】新唐科技2025新品发布会
-
4月30日立即参与 >> 【白皮书】研华机器视觉项目召集令
推荐专题




-
1 HBM4大战







发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论