







4日10日 OFweek 2025(第十四届)中国机器人产业大会
立即报名 >>>
7.30-8.1 全数会2025(第六届)机器人及智能工厂展
火热报名中>>
军工科技导入,数字汽车雷达优势何在?
Uhnder的全数字4D软件定义成像雷达技术可增强分辨率和侦测能力,提升人员、道路与城市的安全性。用DCM取代传统的模拟频率调制的突破性架构实现了无与伦比的角分辨率和抗干扰性,还可以实现HCR,解析出传统雷达传感器在过去侦测不到的并列物体。这将推动汽车雷达过渡到DMR
文︱立厷
图︱网络
2020年11月,成立于2015年的美国初创公司Uhnder完成C轮融资,共募集1.45亿美元,拟将其数字编码调制(DCM)雷达芯片用在包括汽车在内的关键市场。相比目前的模拟雷达,Uhnder的数字4D软件定义成像雷达可提供更高的性能。
Uhnder的技术何德何能,被誉为“汽车市场第一个数字成像、单芯片雷达解决方案”,到底好在哪里?大多数人还不甚了了,我们将其与传统雷达做个比较。
供应链三方合作
早在2018年,Uhnder的第一个客户麦格纳(Magna)就在使用其数字片上雷达(RoC)的优势部署下一代汽车级传感器,研发4D扫描驾驶环境的高清雷达。
今年1月,麦格纳宣布美国电动汽车制造商菲斯克(Fisker)的Ocean SUV高级驾驶辅助系统(ADAS)将搭载其采用Uhnder技术的Icon Radar,预计该车将于2022年底推出。
菲斯克是当年与特斯拉齐名、被称为“特斯拉真正一生之敌”、经历破产重生的电动汽车斗士Henrik Fisker的公司。最近其卷土重来,信息不少,如知难而退放弃了2018年之前就在研发的固态电池;首款量产车型Ocean由麦格纳代工生产,将于2022年第四季度上市;第二款车型将与富士康共同开发,覆盖亚洲市场。
这里主要聊聊为菲斯克注入了新的科技元素的数字汽车雷达。
传统雷达是怎样工作的?
雷达系统发射一个信号,并接收被反射的环境物体或目标的信号,然后对反射信号和发射信号的特性进行比较。单发射机单接收机雷达系统(单输入、单输出或SISO)可以估计环境中目标的距离和速度。
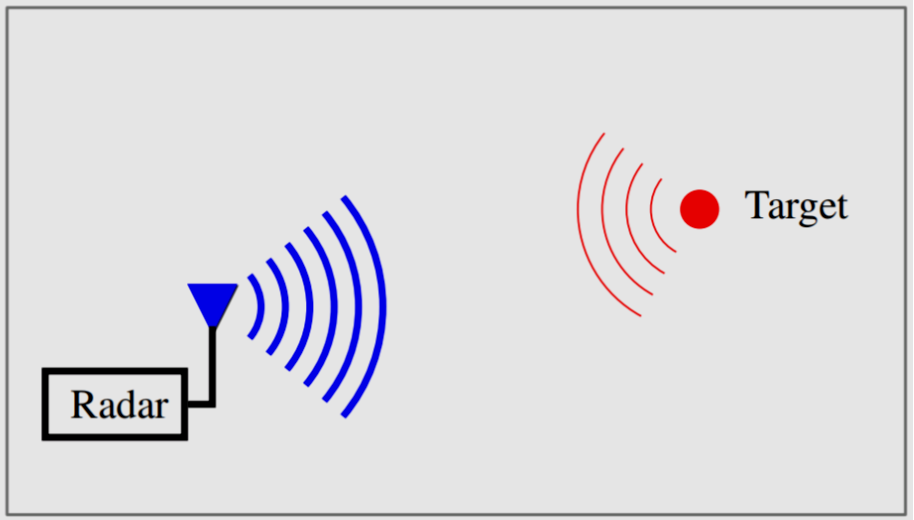
雷达工作原理
SISO雷达系统也可以估计物体的角度(方位角、仰角或两者兼有),但必须采用机械或电子扫描。由于需要额外的扫描,快速运动物体的角度估计不是很准确。
多个发射和接收天线的雷达系统被称为多输入多输出(MIMO)雷达系统,它包括两个发射天线和三个接收天线。每个接收机需要知道来自Tx1和Tx2的信号的定时。因此,雷达系统创建了6个虚拟接收机系统(即2(Tx)x 3(Rx)=6个虚拟接收机)。
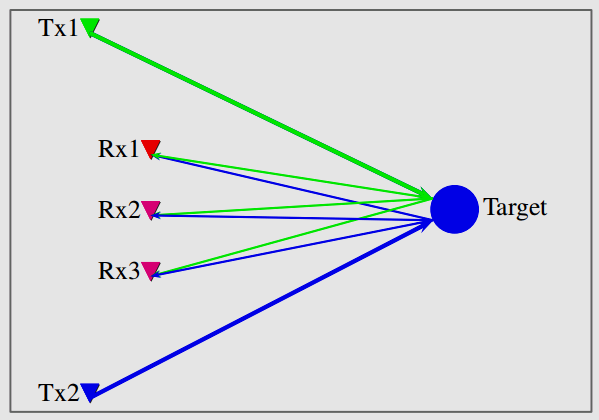
多发射接收天线雷达系统
MIMO雷达系统可以估计环境中物体的角度。一般来说,更多的天线(虚拟接收机)使得雷达系统的设计具有更宽的孔径,从而具有更高的角度分辨率。雷达系统可直接测量被测物体的距离、径向速度和方向。方向可以是方位角、仰角或两者兼有,从而实现距离估计、速度估计和角度估计。
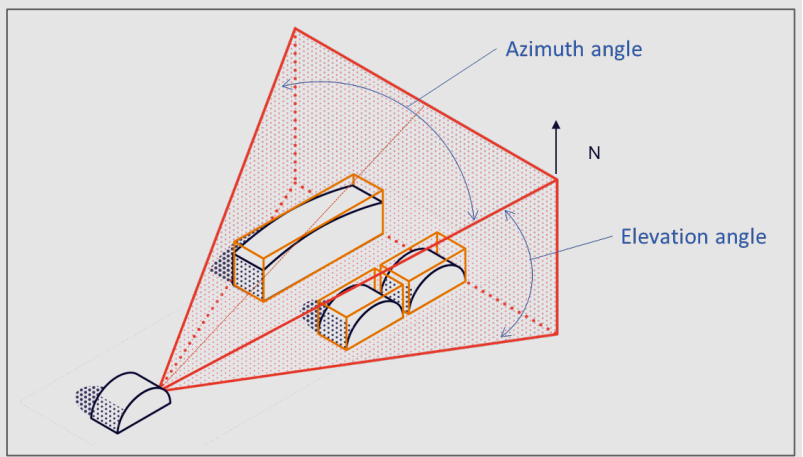
最大方位角和仰角定义视野
传统上,在任何测量维度(距离、速度和角度),上述分辨率的雷达性能都是基于目标相同反射率或雷达散射截面(RCS)。然而,在汽车应用中,这个定义虽然非常重要,但还不够。在这种应用中,雷达分辨距离大目标很近的小目标的能力也很重要,特别是其距离(如卡车前面的小孩)和角度(如护栏旁的行人)。因此,新方法引入了一种称为“高对比度分辨率(HCR)”的概念,这对于确定雷达在驾驶中支持高水平自动化的程度至关重要。HCR代表雷达的接近程度,可以解析两个目标的RCS在任何测量维度上的给定差异。
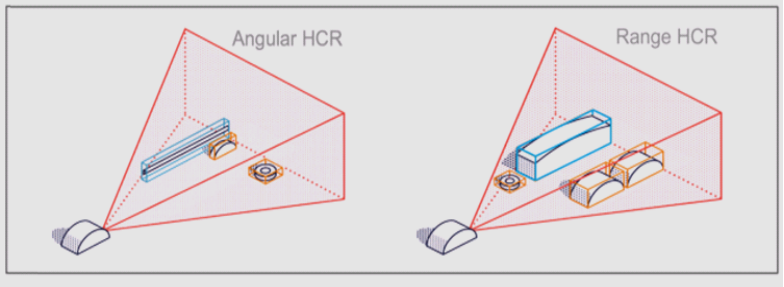
HCR有助于区分靠近大目标的小目标
驾驶自动化与雷达息息相关
今天,越来越多的汽车装上各种雷达系统,如远程雷达(LRR)、中程雷达(MRR)或短程雷达(SRR)。
LRR通常用于相当窄的角度区域内检测远距离(例如,高达300米)的物体,有助于紧急制动、碰撞警告和自适应巡航控制。
MRR具有更宽的视野,通常可以检测150米以内的物体,并可以检测十字路口(横向)接近的物体,可以用于十字路口交通警报功能。
SRR可以在短距离内检测宽角度区域内的物体,通常用于泊车辅助、十字路口交通警报、行人/自行车检测、追尾警告和车道变换辅助。
为了确保更安全的驾驶以及自动驾驶(AD),一辆车可能包含多个LRR、MRR和SRR。一般来说,驾驶自动化水平越高,所需的传感器数量就越多。
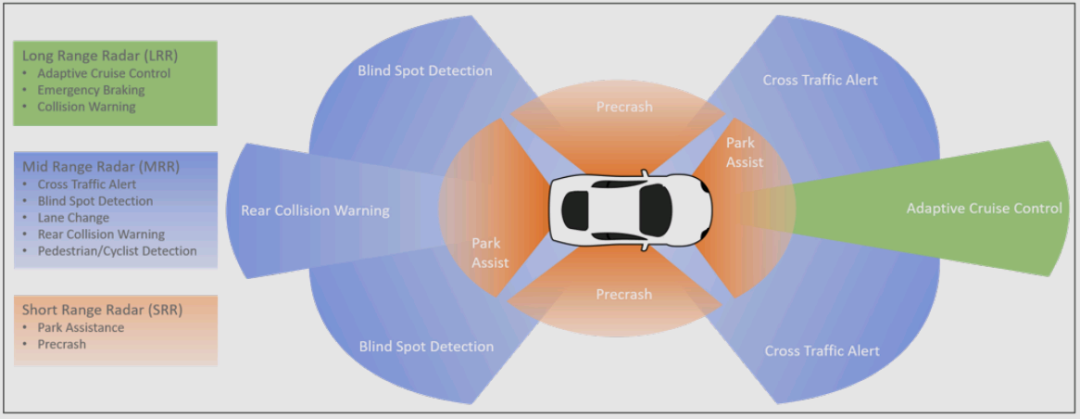
汽车中多个远程、中程和短程雷达
为了提高现有汽车ADAS的性能和可靠性,克服向全自动驾驶(L5)发展的挑战,汽车雷达系统需要提供更高的方位角和仰角分辨率,以及更好的精度和分辨力。这些先进的雷达能力是解决各种场景用例所必需的,这些用例对传统雷达来说是具有挑战性的。
如果没有更高的分辨率、精度和更好的识别能力,雷达系统可能很难识别高速公路上的开阔车道、隧道入口处或桥下的熄火汽车、道路上的小碎片或汽车旁边的骑车人。
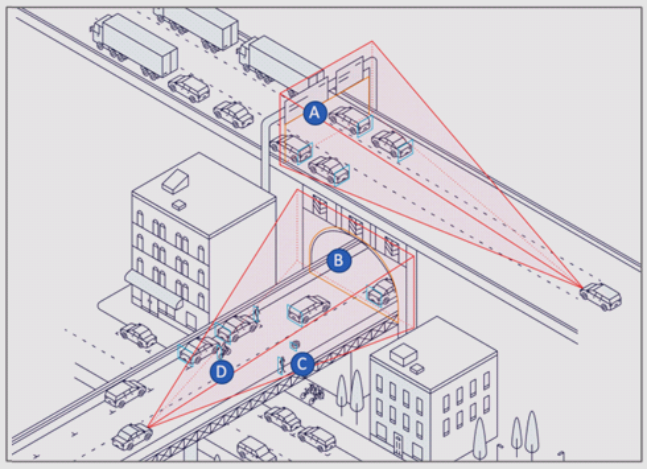
重要雷达用例
A.
数字雷达探测到一条开阔的车道,而其他雷达可能看到一堵3辆车宽的“墙”
B.
以高速行驶时,在安全制动距离下,数字雷达可探测到隧道和隧道中抛锚的汽车
C.
数字雷达可以发现轮胎或砖块,早到足以改变车道或刹车,即使是以高速公路的速度
D.
数字雷达能探测到大物体旁边的小物体,比如汽车旁边的骑自行车的人。
此外,雷达必须对道路上的其他雷达提供更强大的抗干扰机制,特别是随着越来越多地部署更高水平的自动化,汽车配备的雷达越来越多。雷达是一种特别容易受到自干扰(来自同一辆车上其他雷达的干扰)或交叉干扰(来自其他车上雷达的干扰)的技术。这种干扰敏感性是雷达广泛部署的一个重要限制。
迄今为止,汽车上最常用的雷达技术是调频连续波(FMCW)雷达,其最新版本称为快速啁啾(chirp)调制(FCM)。另一种雷达类型是采用DCM的数字调制雷达(DMR)。

 分享
分享

图片新闻








技术文库
最新活动更多
-
即日-3.27立即报名>> 【在线直播】解密行业检测流量密码——电子与半导体行业
-
3月27日立即报名>> 【工程师系列】汽车电子技术在线大会
-
即日-3.28立即报名>>> 【在线会议】汽车检测的最佳选择看这里
-
即日-3.31立即报名>>> 【在线会议】AI加速卡中村田元器件产品的技术创新探讨
-
4月1日立即下载>> 【村田汽车】汽车E/E架构革新中,新智能座舱挑战的解决方案
-
4日10日立即报名>> OFweek 2025(第十四届)中国机器人产业大会
推荐专题











发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论