







4日10日 OFweek 2025(第十四届)中国机器人产业大会
立即报名 >>>
7.30-8.1 全数会2025(第六届)机器人及智能工厂展
火热报名中>>
基于FPGA的步进电机多轴控制器设计
2012-10-15 10:31
来源:
与非网
步进电机 FPGA 取样针移位系统
步进电机是一种完全数字化的电动执行机构,从原理上说,其角位移与驱动脉冲的个数成正比,在正常情况下,步进电机具有使用简单、运动精确、连续运行无累积误差等特点,因而被广泛应用于各种位置控制系统中。
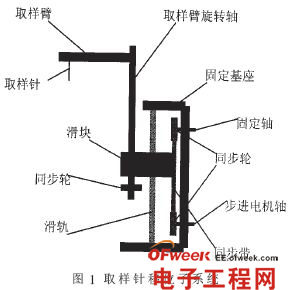
当前由于仪器内部的机械系统日益复杂,其运动往往是多自由度的,因而通常需要利用多个步进电机的运动合成来实现系统的各种动作。例如,对图1所示的半自动生化分析仪的取样针移位系统,该系统的动作执行就是由两部分组成的:
一是固定基座上的步进电机控制取样横臂进行垂直方向上的升降运动;
二是滑块上的步进电机控制取样横臂进行水平方向上的旋转运动。
这两个运动的合成实现了取样横臂的位置变换。
传统的步进电机多轴控制器是以微控制器(MCU)/微处理器(MPU)/专用集成电路(ASIC)/数字信号处理器(DSP)为核心,再辅以其他外围分立器件构成的。这种结构的步进电机多轴控制器的优点在于其硬件结构清晰,易于复制再现,对于类似的应用只需要修改其应用软件即可。然而对于多数实际应用来说,单纯依靠软件的修改通常不足以使其达到其他应用场合所需的要求,并且当系统升级时,通常需要对整个电路重新进行设计,这样既延长了升级的周期,又增加了升级成本,因而在实际应用中受到了一定的限制。

 分享
分享
声明:
本文由入驻维科号的作者撰写,观点仅代表作者本人,不代表OFweek立场。如有侵权或其他问题,请联系举报。
图片新闻








技术文库
最新活动更多
-
技术指南立即下载>> 电动汽车功率半导体技术趋势变化带来的挑战及解决方案
-
即日--2.7了解详情>> 【森海塞尔】TeamConnect系列产品——提升视听之体验,塑造音频之未来
-
限时免费立即试用>> 燧石技术,赋光智慧,超越感知
-
2月28日火热报名中>> 【免费试用】东集技术年终福利——免费试用活动
-
即日-3.21立即报名 >> 【深圳 IEAE】2025 消费新场景创新与实践论坛
-
4日10日立即报名>> OFweek 2025(第十四届)中国机器人产业大会
推荐专题










发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论